


Attività sperimentali e prove di volo per il velivolo MH1000
Introduzione
Le campagne di test di volo sono un’attività fondamentale per tutti i velivoli progettati, prototipati e prodotti in MAVTech. Per il velivolo ad ala fissa modello MH1000 sono state svolte le prime giornate di prove sperimentali nei mesi di gennaio e febbraio 2021, al fine di testare le prestazioni del modello, ottimizzare i parametri di volo e verificare l’applicabilità del velivolo per diverse tipologie di missione. Le prove sono state realizzate inizialmente presso un campo volo. Le attività comprendono inoltre voli su campi coltivati, ad esempio su vigneti.
Descrizione delle attività
Le attività di volo sono state realizzate in seguito al compimento delle fasi di progettazione e di definizione delle missioni. Sono state inoltre previste e portate a termine una serie di attività preliminari, suddivise principalmente nei seguenti due step:
Progettazione del velivolo e realizzazione del prototipo
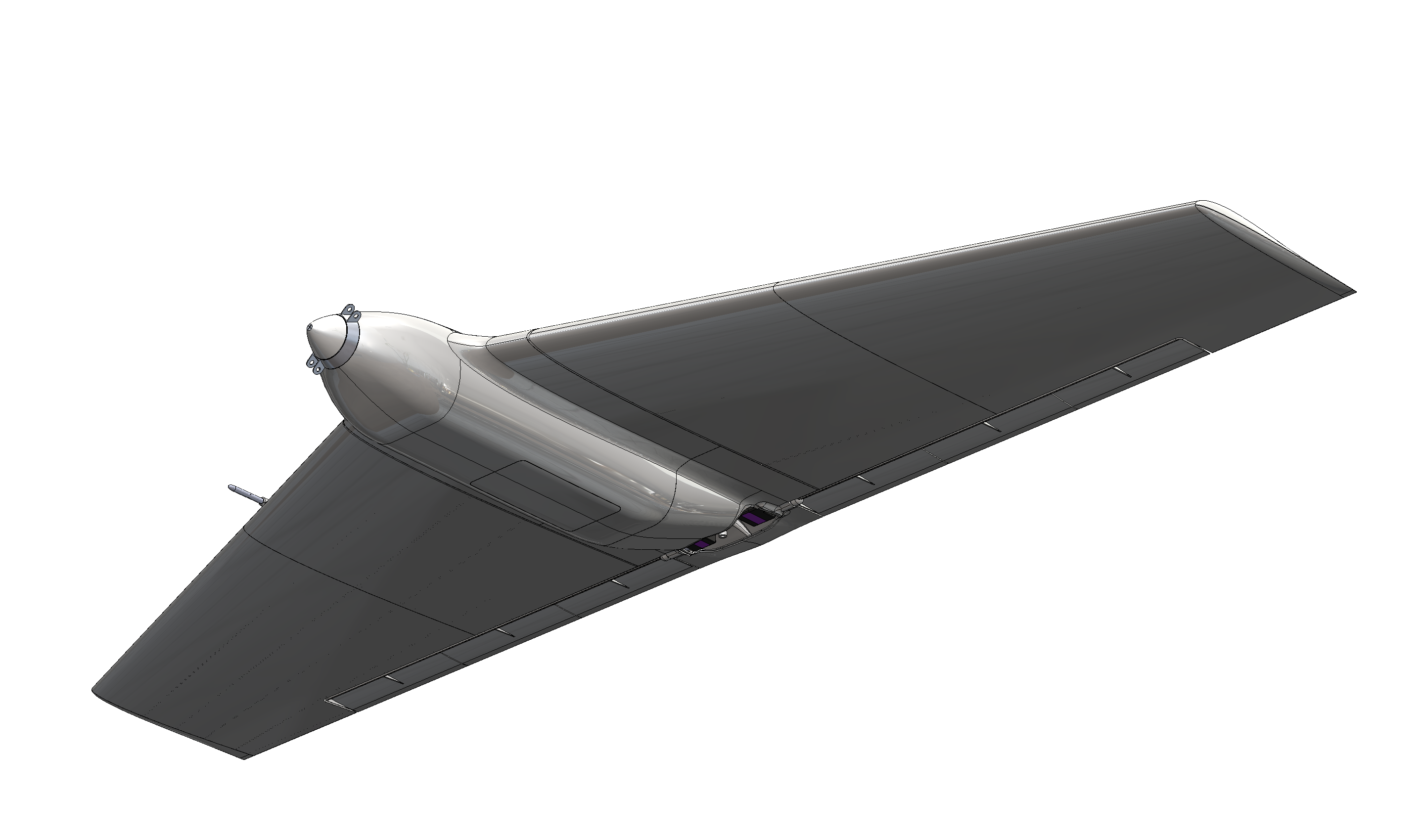
Il velivolo è stato interamente progettato e prototipato in azienda dal team MAVTech. È un Sistema Aeromobile a Pilotaggio Remoto (SAPR) ad ala fissa multifunzionale progettato principalmente per lo svolgimento di missioni di ricognizione, rilievi e sorveglianza del territorio. Grazie alla sua configurazione wing-body integrata, la sua capacità di carico è adatta all’integrazione di sensori specifici per il compimento di rilievi, come ad esempio la camera multispettrale Micasense Rededge-M.
Pianificazione dei test e delle missioni di volo
Le prove vengono realizzate in seguito allo studio dei parametri di volo che possono essere variati e gestiti all’interno dell’autopilota. Questi parametri sono importanti per la verifica della manovrabilità e della stabilità del velivolo, per i test in velocità media di crociera e per tutte le verifiche delle prestazioni in decollo e atterraggio. Inoltre, le fasi di progettazione dei test di volo includono anche la pianificazione di missioni automatiche, ad esempio mediante la simulazione di un rilievo a griglia con sensore multispettrale. Le missioni automatiche saranno svolte in seguito all’ottimizzazione dei parametri di volo. Per questo modello viene inoltre sperimentata la modalità di decollo con lancio mediante l’utilizzo di un apposito sistema ad elastico.
Risultati
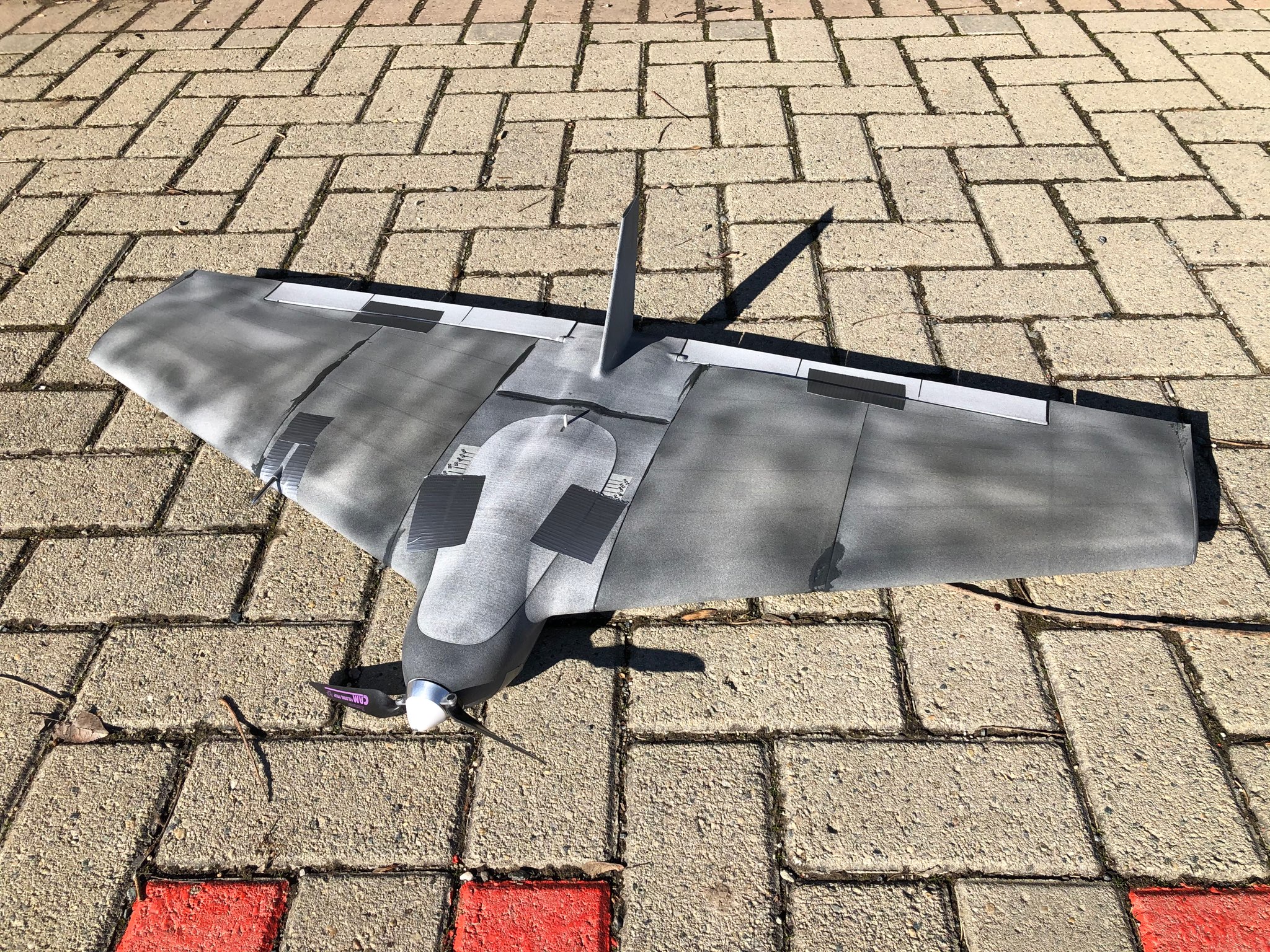
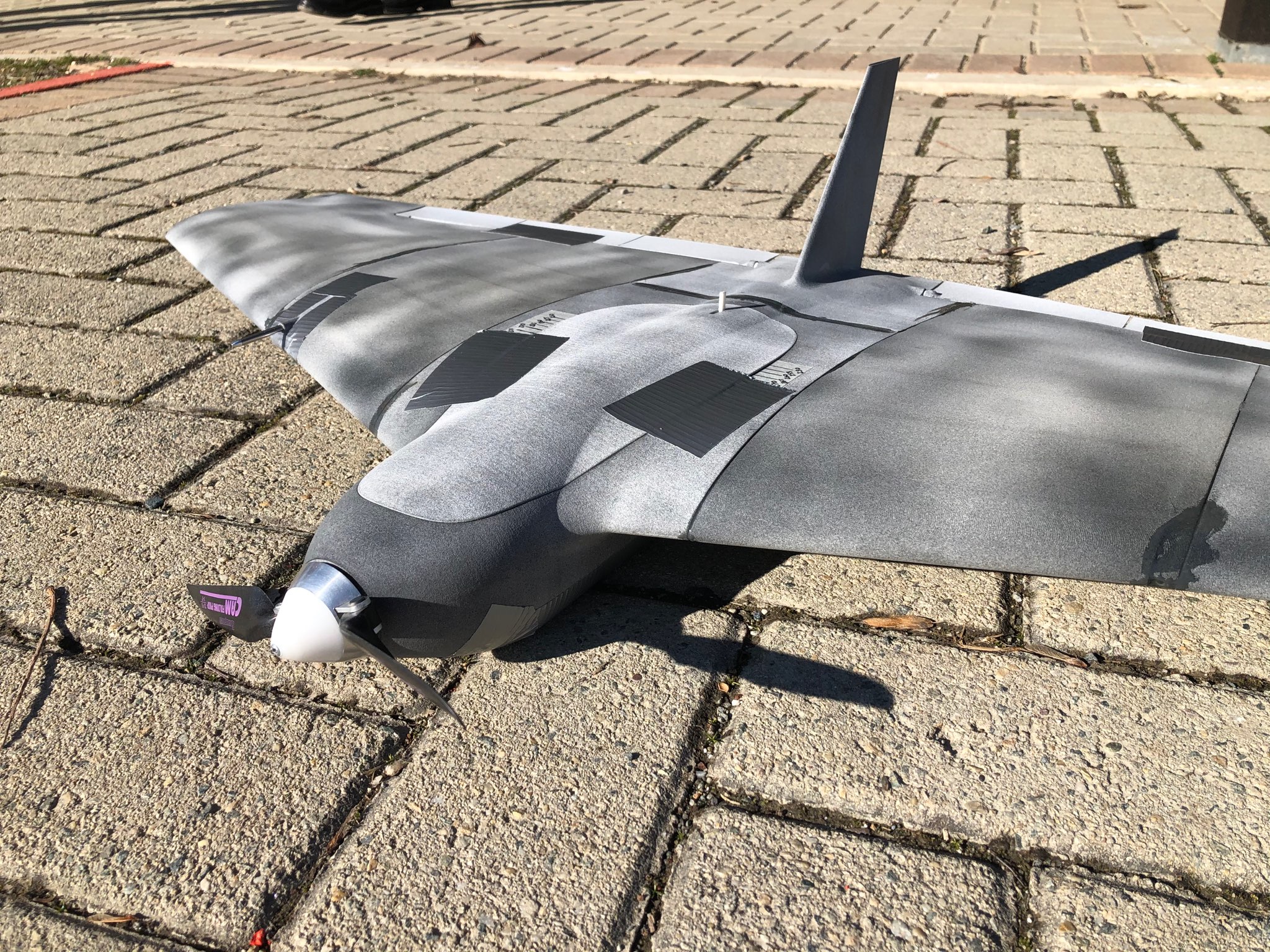
Una volta terminate le fasi preliminari di progettazione e prototipazione, le attività in campo hanno inizio!
Campagna sperimentale al campo volo
- Configurazione base: MH1000
- Peso: 1115 g
- Autopilota: Pixhawk 2 (FW Version: 4.0.7)
- Lancio: con elastico, modo di volo STABILIZE

Analisi dei log di volo
I voli sono stati un successo! Ci hanno permesso di ottimizzare i parametri di volo e di migliorare le prestazioni del modello, ottimizzandolo per le applicazioni d’interesse.
In seguito ad ogni giornata di prove viene svolta un’attività indispensabile all’ottimizzazione delle prestazioni del velivolo: l’analisi dei log di volo e la valutazione della variazione delle grandezze d’interesse. In seguito a queste analisi è possibile osservare e studiare l’insorgere di fenomeni quali lo stallo del velivolo, la precisione di compimento delle missioni automatiche, le prestazioni in mantenimento di quota e così via. È inoltre possibile ricavare dati sull’autonomia di volo, sulla stabilità del velivolo e sull’interazione tra i comandi del pilota e la gestione automatica della velocità di volo e della manetta da parte dell’autopilota in alcune modalità di volo.
Autotune in volo: regolazione PID
In figura è riportata la traiettoria di volo compiuta durante la fase di AUTOTUNE. In particolare è visibile il pitching realizzato dal pilota, necessario per l’ottimizzazione automatica dei parametri di volo.
Analisi modo di volo STABILIZE: test per l'ottimizzazione del mantenimento di quota
Durante la seconda prova di volo vengono verificati i modi di volo STABILIZE e MANUAL, principalmente realizzando traiettorie ovali e semicircolari. Si analizzano il volo livellato in circolo, le prestazioni in virata, a cabrare, a planare e in mantenimento di quota. Si osserva come nelle fasi di planata il velivolo smaltisca molta quota. Anche durante le virate si evidenzia la necessità di ottimizzare i parametri di volo per il mantenimento di quota. Essa viene però ripresa molto rapidamente grazie alla spinta del motore. Il velivolo risulta potenzialmente in grado di compiere una salita verticale.

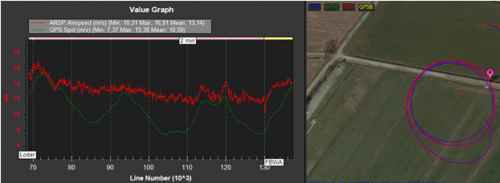
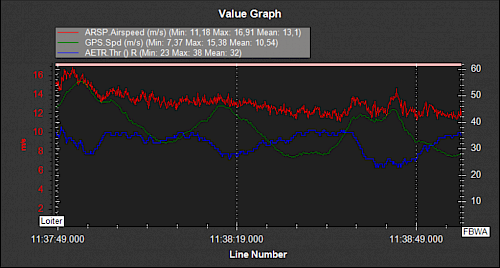
Analisi modo di volo LOITER: utilizzo del tubo di Pitot
Si può osservare come la velocità al suolo (GPS_Spd) vari secondo un’oscillazione periodica dalle caratteristiche all'incirca costanti in funzione della traiettoria di volo. Questo dipende dalla direzione del vento, che, durante il compimento della stessa traiettoria circolare ripetutamente, risulterà in certi punti a favore e in altri contrario al verso della direzione di moto del velivolo. Si osserva quindi la variazione di quantità di moto del velivolo durante l’avanzamento della traiettoria e le zone in cui esso risulta controvento.
Paragonando le velocità alla variazione di manetta richiesta (AETR.Thr) si ha un ulteriore conferma del fenomeno. Infatti, quando il velivolo è in direzione di moto controvento, si osserva una diminuzione della velocità relativa al velivolo ed un conseguente aumento di manetta richiesto per riportare la velocità al valore di crociera impostato. Questo permette al velivolo di compensare la variazione di velocità analizzata, mantenendone un valore, misurato dal tubo di Pitot, all’incirca costante.
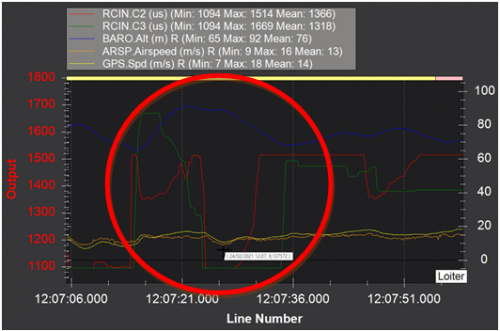
Verifica dell'insorgere del fenomeno dello stallo
Durante le ultime prove di volo viene valutato il fenomeno dello stallo. Nel grafico in figura si può osservare come, in seguito all’aumento del comando a cabrare (RCIN.C2) e ad una diminuzione del comando di manetta (RCIN.C3), si rilevi un aumento di quota (BARO.Alt) ed una diminuzione della velocità di volo relativa e della velocità al suolo, fino ad ottenere lo stallo. Esso avviene in questo caso ad una velocità di circa 9 m/s. Bisogna considerare che questo test è stato svolto in modalità FBWA, in cui è attivo il parametro di mantenimento di una velocità minima, in questo caso settato a 10 m/s (parametro ARSPD_FBW_MIN). Anche per questo motivo, si verifica uno stallo lieve. Infatti, il velivolo riprende subito velocità ed un assetto di volo stabile. D’interesse per le prove future sarà valutare lo stallo in modalità STABILIZE, in cui il velivolo non è limitato dal mantenimento di una velocità minima di volo.
Missione automatica: verifica delle prestazioni di compimento della missione
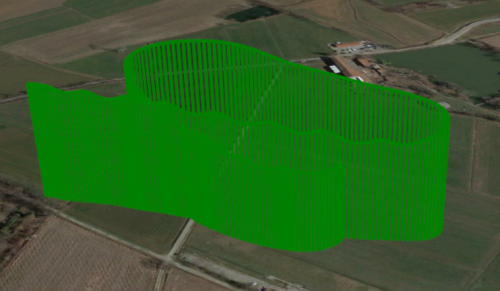
Infine, vengono testate le prestazioni del mezzo durante il compimento di una missione automatica. Innanzitutto, a terra viene impostato il parametro WP_RADIUS a 10 m. Esso rappresenta il raggio di distanza all’interno del quale ogni waypoint della missione risulta raggiunto. In seguito, viene progettata una missione automatica di sorvolo a griglia, grazie alla quale, una volta impostato il velivolo in modalità AUTO, inizierà il compimento della missione automatica. In figura è possibile osservare la variazione di velocità del velivolo durante la missione, visibile sulla mappa. La missione è stata progettata tenendo conto delle specifiche del sensore che andrà a costituire il payload a bordo del velivolo e di conseguenza della frequenza degli scatti e della quota di volo scelta per poter rilevare l’intera superficie monitorata.
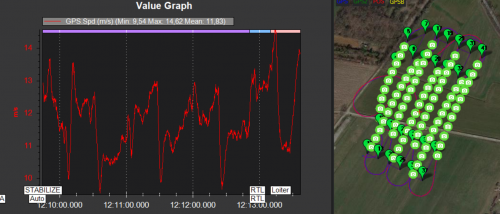
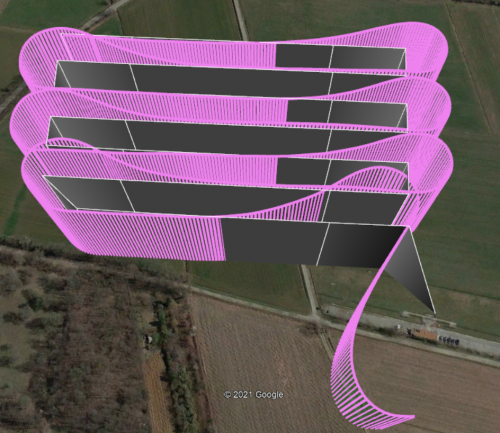
La missione risulta interamente compiuta ed al termine dell’ultimo segmento della traiettoria di volo il velivolo ritorna verso la posizione HOME, entrando in modalità LOITER una volta raggiunta la posizione geografica di lancio. Le prestazioni di volo risultano buone. Tuttavia, analizzando a posteriori la traiettoria compiuta dal velivolo, si osserva che la precisione di manovra garantisce in parte una traiettoria completamente sovrapposta alla griglia di missione progettata a terra prima del lancio. Ciò avviene a causa della considerazione di spazi di manovra limitati. Ad esempio, inserendo i waypoint aggiuntivi posti all’esterno del poligono da sorvolare, che determinano le distanze definite di lead-in e di lead-out, a distanze non sufficienti, il velivolo non sarà in grado di compiere manovre appropriate.
Tale risultato si può osservare nella figura seguente, in cui viene rappresentata la griglia progettata durante la fase di definizione della missione automatica (in grigio) e la traiettoria effettivamente compiuta dal velivolo (in rosa). Si osserva come circa solo la metà di ogni segmento di volo venga svolta correttamente in volo livellato. Risulta quindi necessaria un’ottimizzazione dei parametri di volo in modalità AUTO e allo stesso tempo un’analisi approfondita dei parametri di progettazione della missione.

