Demo di Ricerca e Soccorso - Geoparc Bletterbach (BZ), Italia
INTRODUZIONE
Il presente blog descrive le attività di volo effettuate il 6 agosto 2020, al Geoparc Bletterbach, Aldino (BZ), per simulare una missione di ricerca e soccorso con drone MAVtech in ambiente alpino.
Le attività di volo sono state effettuate per conto del Centro di ricerca dell'EURAC, Centre for Sensing Solution. L'esercitazione rientra nel progetto Interreg S.T.A.R.T. (ITAT3023) e coinvolge anche l'Istituto di Medicina d'Emergenza in Montagna dell'EURAC e il Corpo Nazionale di Soccorso Alpino e Speleologico (CNSAS) dell'Alto Adige.
Il servizio di consulenza consiste in:
- Utilizzo di un drone a scopo di ricerca e soccorso
- Registrazione dei log di volo dei droni
- Acquisizione di immagini e video durante le fasi di volo
Per lo svolgimento del servizio di consulenza sono state utilizzate le seguenti attrezzature:
- Drone Mavtech Q4T
- Videocamera con zoom ottico 10x
- Videocamera di navigazione e sistema di sgancio del payload
- Payload Control System (PCS)
Panoramica dei voli
Scenario di volo
L'operazione di volo è stata effettuata nel Geoparc Bletterbach, situato ad Aldino (BZ). Il parco ha un'estensione di circa 200 ettari e si trova ad un'altitudine compresa tra i 1500 e i 2000 metri.
Sono stati definiti tre diversi punti di decollo e di atterraggio, in accordo con gli operatori di EURAC e CNSAS.
Tali aree saranno i punti di partenza per le missioni di ricerca e salvataggio.
Equipaggiamento di volo
Il drone utilizzato per le missioni di ricognizione è il MAVTech Q4T.
Il drone è stato progettato dall'azienda per diverse applicazioni, quali fotogrammetria, missioni di sorveglianza, ricerca e soccorso e per attività di volo che richiedono una navigazione affidabile e precisa, anche in condizioni estreme come nel caso dell'ambiente alpino.
Il drone MAVTech Q4T è autorizzato ad eseguire operazioni specializzate non critiche e operazioni specializzate critiche, secondo gli scenari standard S03, S05, S07.
Due SAPR, basati sul Q4T, sono stati preparati per il servizio di consulenza:
- drone per la ricerca
- drone per il salvataggio

Drone da ricerca
Il drone MAVTech Q4T in configurazione "Ricerca" ha le seguenti caratteristiche principali:
Massa Massima al Decollo (MTOM): 4,5 kg
Autonomia: 20 min
Payload: Videocamera zoom 10x HD
Una videocamera è installata a bordo dell'APR per effettuare la ricerca. La videocamera è la Yangda Sky Eye-I (figura sotto) ed è costituita da una camera ottica con zoom 10x, con un sistema giro-stabilizzato a 3 assi ad alte prestazioni. Questo payload ha un meccanismo di sgancio rapido ("quick-release") per installarlo rapidamente sul drone.
Caratteristiche principali di Yangda Sky Eye-I:
- Risoluzione video: Full HD (1080P)
- Risoluzione delle immagini: 4MP
- Zoom ottico: 10x

La videocamera è controllata dal Payload Control System MAVTech (MAV-PCS). Ospita un touch-screen capacitivo FullHD da 13,3", un miniPC windows e joystick/cursori per il controllo di pan, tilt e zoom, con altre funzioni ausiliarie del payload. Un secondo operatore, diverso dal pilota in comando (PIC, Pilot In Command), controlla il PCS e visualizza le immagini sullo schermo.
Il MAV-PCS ha una batteria Lipo integrata, che garantisce 5 ore di autonomia. Può anche essere collegato ad un alimentatore a 220 V per caricare la batteria interna. Il case è robusto e certificato IP67 e STANAG 4280: resiste alla polvere, all'acqua e agli urti leggeri.

Drone da soccorso

Un secondo SAPR, anch'esso basato sul Q4T, è stato preparato per trasportare e rilasciare un payload che contiene materiale di primo soccorso e un walkie-talkie.
Il drone ospita una telecamera di navigazione FPV che trasmette il video al pilota.
La telecamera ha un ampio campo visivo (160°) e la risoluzione video è di 4K @ 30 fps.
A bordo è installato un meccanismo per il rilascio del payload, che viene comandato dal pilota una volta raggiunta l'area di rilascio.
La caduta della scatola dell'equipaggiamento medico viene rallentata attraverso l'uso di un piccolo paracadute.
Caratteristiche delle operazioni
Durante la fase di ricerca della persona scomparsa, il pilota porta il drone nell'area di ricerca, guidato dall'operatore PCS che fornisce al pilota la direzione da seguire. Per questa fase non sono state prese in considerazione missioni automatiche.
Prima di ogni missione di volo, il drone viene preparato dal pilota e dal suo assistente. Questa fase consiste nell'installazione del carrello, delle eliche e della videocamera con il meccanismo di sgancio rapido. Vengono effettuati controlli pre-volo obbligatori per verificare l'integrità del sistema e dei componenti principali, come le eliche, il carrello di atterraggio, i bracci e il payload.
Una volta completata la checklist pre-volo,l'APR viene posizionato nel punto di decollo, il radiocomando viene acceso e, infine, viene inserita la batteria principale del drone.
Il pilota verifica che le condizioni siano sicure per il volo e poi arma il velivolo, iniziando il decollo. La missione di volo consiste in una ricognizione manuale dell'area, mentre l'operatore del PCS fornisce informazioni e raccomandazioni al PIC in merito alla direzione di volo e/o a possibili soste in hovering per effettuare una ricerca più accurata in un'area specifica.

L'obiettivo di queste attività di volo è anche quello di valutare la massima copertura in termini di area scansionata dal drone dei tre punti di decollo selezionati. Durante il volo, il PIC verifica la sua capacità di controllare il veicolo in VLOS (Visual Line of Sight). Una volta raggiunta la distanza massima, comunica all'osservatore il raggiungimento della distanza più remota.
La distanza massima viene definita dall'Ing. Fabio Benedetto, il quale è in grado di valutare la fattibilità e la sicurezza dei voli, grazie alla sua lunga esperienza nel pilotaggio SAPR. Tale distanza sarà verificata dopo i voli analizzando i registri di volo.
Una volta completata la missione, il pilota riporta il drone al punto di partenza, quindi atterra e disarma il veicolo.
Il volo è completato e il drone viene smontato e riposto nella sua valigia per il trasporto.
Missioni di volo
Le missioni di volo sono state effettuate, ciascuna a partire dai viewpoints designati per il decollo e l'atterraggio.
Il primo volo si è svolto nella parte alta del canyon, vicino alla cascata. Il secondo e il terzo volo sono stati effettuati nella parte centrale del Geoparc Bletterbach, vicino al "Butterloch". I paragrafi seguenti descrivono più nel dettaglio le missioni di volo.

Volo 1
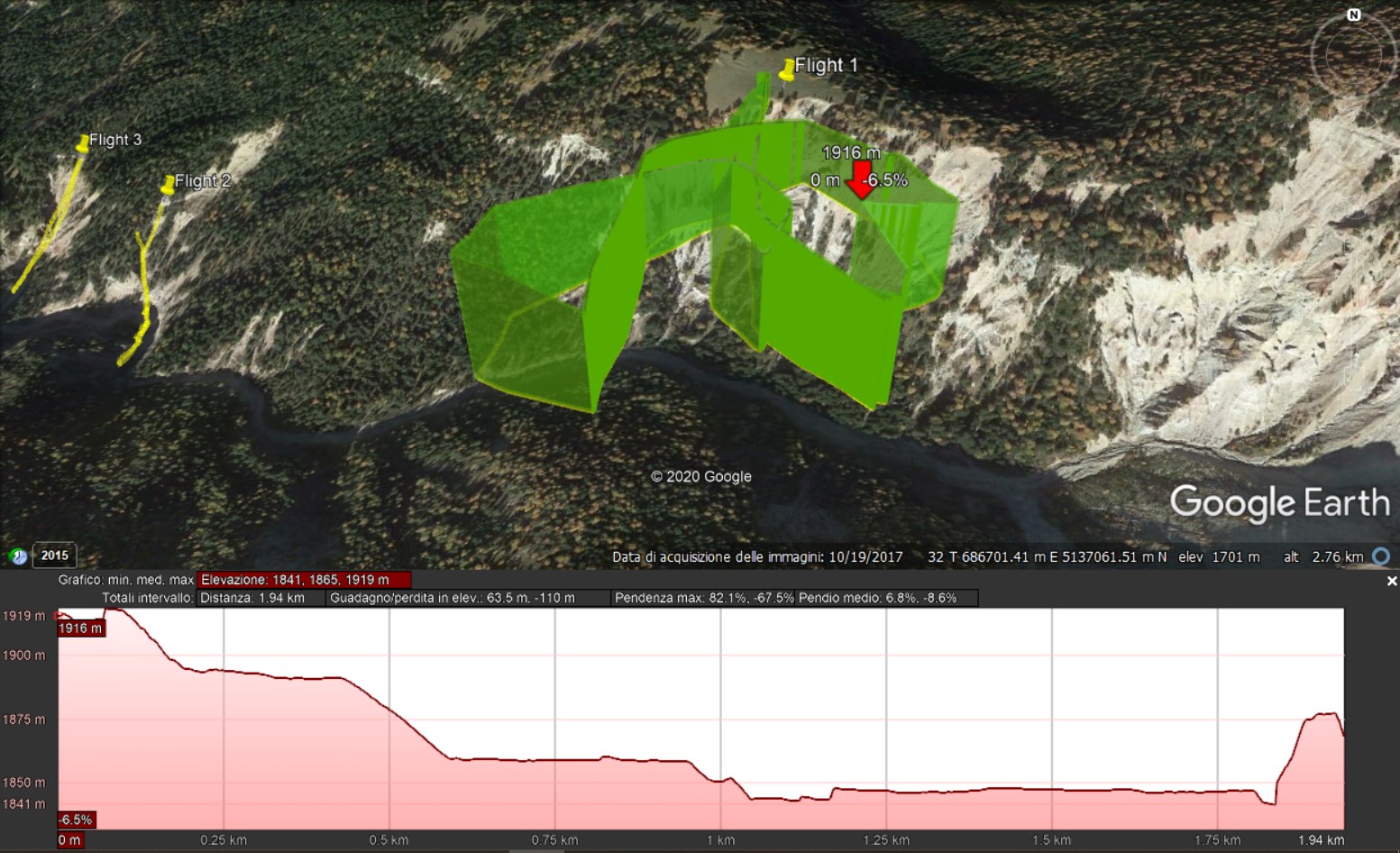
Il primo volo è stato effettuato nella parte alta del canyon, vicino alle cascate. Il decollo e l'atterraggio sono stati completati in cima alla parete rocciosa sul lato sinistro nella figura sottostante.
Durante la missione, il pilota ha sorvolato l'intera area, senza abbassare il velivolo nella gola. Ciò si è reso necessario perché nella parte inferiore c'era un'elevata presenza di piante alte, che avrebbero potuto ostacolare la visibilità tra il pilota e il velivolo, aumentando il rischio della missione di volo.
Tuttavia, attraverso il Payload Control System, l'operatore a terra ha potuto osservare con precisione l'intera area di interesse, valutando in tempo reale l'effettiva visibilità da quella quota.

La missione di volo è stata caratterizzata da una discesa di circa 50 m rispetto al punto di decollo. La figura sottostante mostra il profilo altimetrico della missione.
Il decollo è avvenuto a 1900 m, mentre durante la fase di ricerca il drone è sceso ad una quota di circa 1850 m.
Il tempo di volo della missione è stato di 22 minuti.
Volo 2
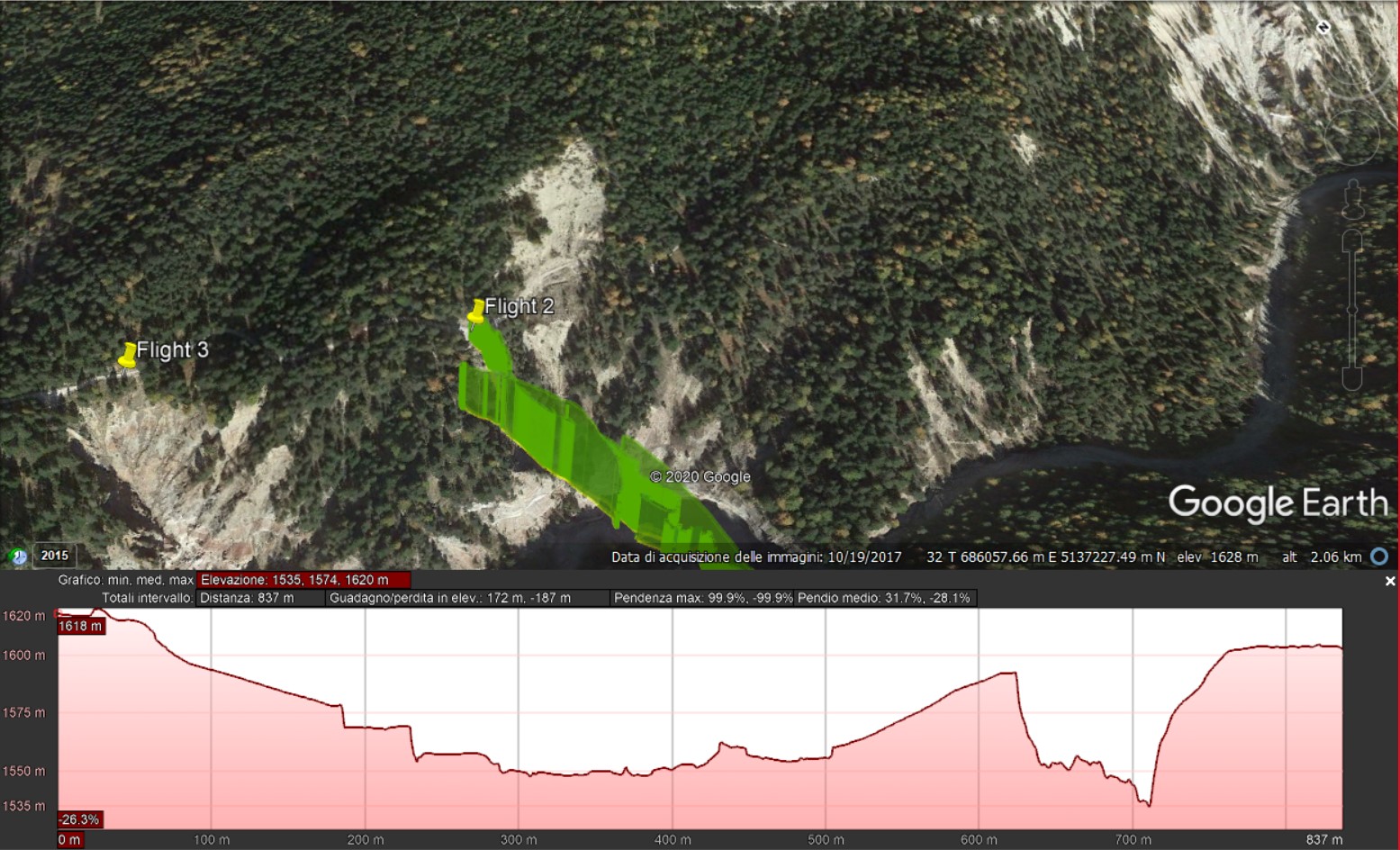
Il secondo volo si è svolto nelle vicinanze del "Butterloch".
Il decollo è stato effettuato nel viewpoint superiore, mentre l'atterraggio è stato completato in un punto inferiore. Ciò è stato deciso dal pilota per garantire la Visibilità in Line Of Sight (VLOS) del velivolo e per poter raggiungere ulteriori punti di osservazione per la valutazione della qualità del volo in posizioni più distanti.

L'altitudine di decollo è stata di 1620 m e durante la fase di ricerca della missione il drone è sceso ad una quota minima di 1535 m (vedi profilo altitudinale nella figura sottostante).
Il drone ha raggiunto l'altro lato del canyon per osservare meglio il lato opposto della zona e poi è tornato al punto di atterraggio.
La missione di volo è durata 21 minuti.
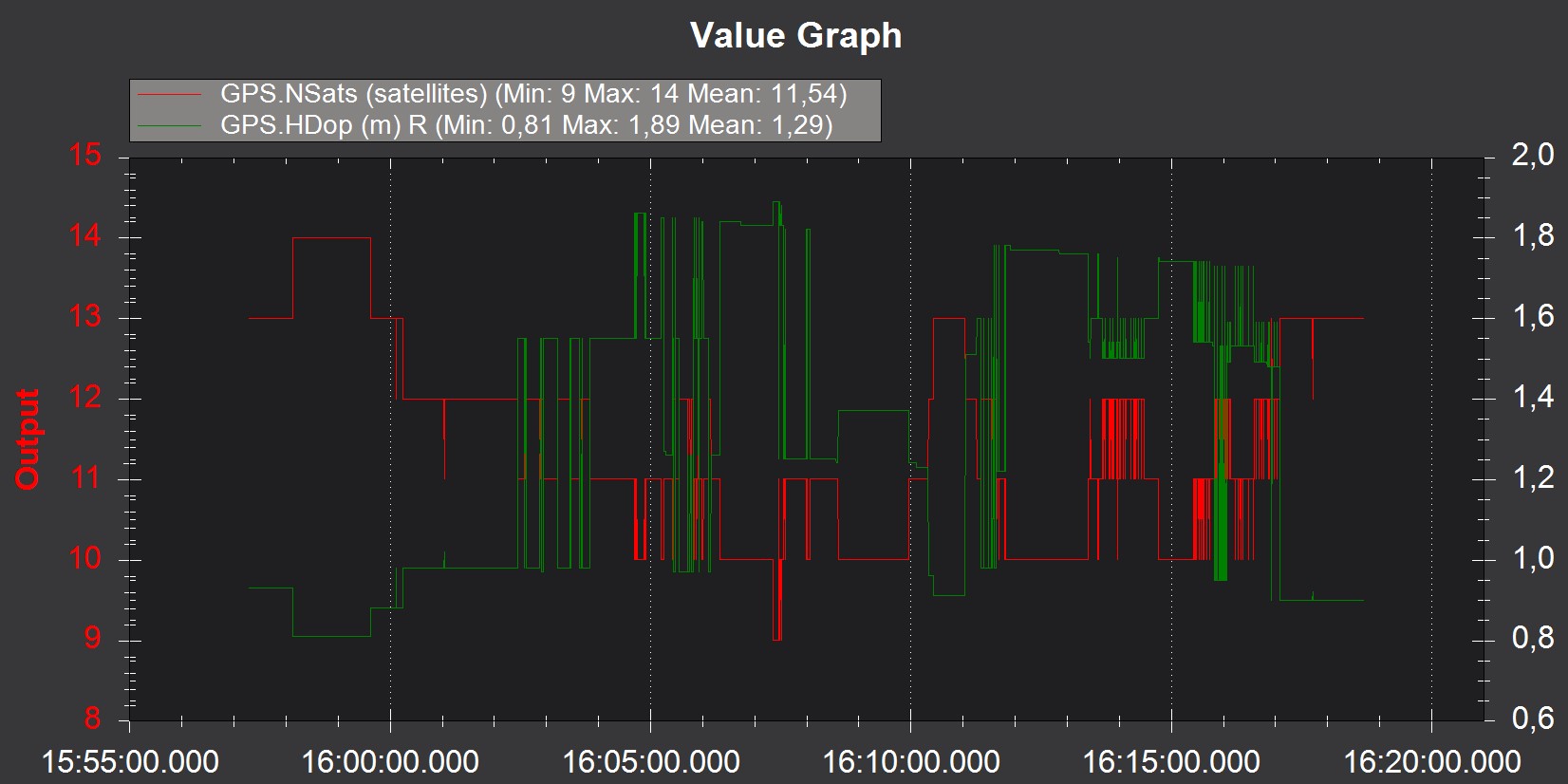
A causa dell'elevata presenza di alberi molto alti, la ricezione del segnale GPS per il posizionamento del velivolo deve essere valutata per tutta la durata del volo.
Infatti, il numero di satelliti è variato tra 9 e 14, valori sufficienti ma non ottimali.
Di conseguenza, per le cause appena citate, il valore del parametro "Horizontal Diluition of precision" (HDop) è rimasto superiore a 1 per la maggior parte della missione. Questo valore rappresenta in un certo modo l'incertezza del posizionamento orizzontale, la quale più sarà bassa, più il posizionamento sarà influenzato da un errore inferiore.
In questo caso, i valori HDop sono sempre buoni, anche se spesso rimangono al di sopra del valore ottimale "1". Tuttavia, queste osservazioni devono essere ponderate rispetto all'ambiente operativo. Infatti, a priori, osservando la morfologia dell'area di volo, ci si aspettava di ottenere un HDop molto più alto, causando una maggiore incertezza nel posizionamento GPS del velivolo. Il numero di satelliti e i valori di HDop sono rappresentati nel grafico della figura sottostante, dove in rosso è rappresentato il numero di satelliti e in verde il valore di HDop durante l'intera missione di volo. L'intervallo di valori per il numero di satelliti è mostrato sulla sinistra del grafico e l'intervallo di valori per l'HDop è mostrato sull'asse destro.
Volo 3
Il terzo volo, come il secondo, è stato effettuato nelle vicinanze del "Butterloch". L'area di decollo e di atterraggio si trovava nel viewpoint vicino al segnaposto "Volo 3" nella figura sottostante.

Osservando la figura sottostante, il decollo è stato eseguito ad un'altitudine di 1582 m. Durante la fase di esplorazione, il drone è sceso per 90 m ad un'altitudine di 1492 m.

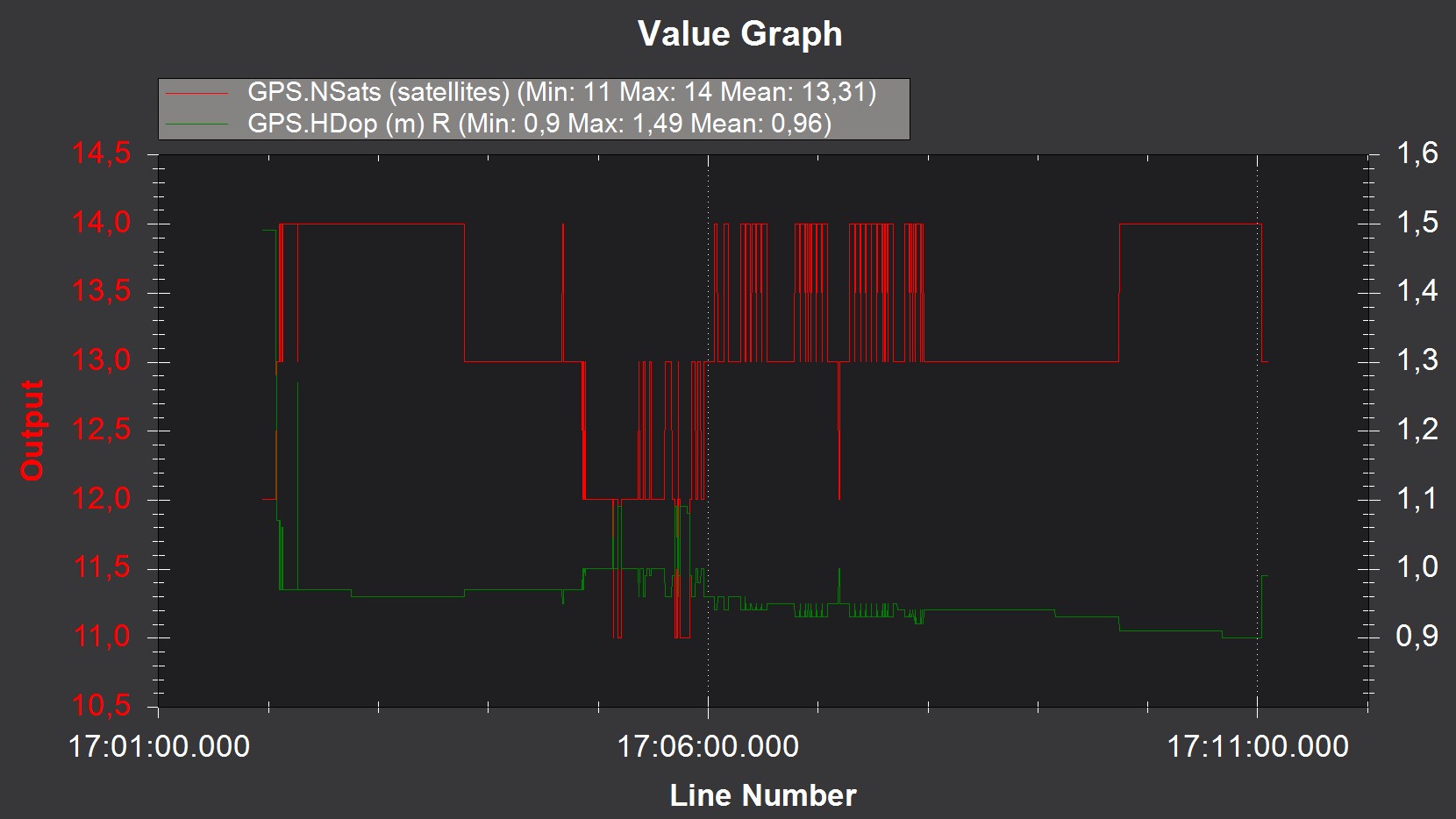
Nonostante la profonda discesa all'interno del canyon a circa 90 metri di dislivello (circa 20-30 metri stimati rispetto al terreno), la qualità del segnale GPS è sempre stata eccellente, con un numero di satelliti compreso tra 11 e 14 e un valore HDop quasi sempre inferiore a 1 (si veda la figura sottostante).
In questo caso, data la geomorfologia della zona di volo, l'incertezza molto bassa nel posizionamento GPS del velivolo è sorprendente. Questo, insieme all'esperienza del pilota e alla perfetta visibilità di pilotaggio, ha permesso la discesa nel canyon e l'avvicinamento alla zona di interesse senza alcuna difficoltà.
Allo stesso modo, ripercorrendo la strada a ritroso, è stato possibile salire e tornare comodamente al punto di decollo/atterraggio al termine della missione.
Il tempo di volo della missione è stato di 10 minuti.