
START2

Il progetto START2 (Smart Test of Alpine Rescue Technology 2) mira a sviluppare l'uso di droni semiautonomi per il soccorso in ambienti estremi, come le montagne, di persone in difficoltà . Si esploreranno tecnologie per l'automazione della pianificazione dei voli, la valutazione del rischio e l'uso di sensori, oltre al trasporto di materiali e persone su terreni difficili. Un Living Lab interregionale permetterà di testare e applicare rapidamente nuove tecnologie, favorendo la cooperazione tra utenti, PMI e ricercatori per rispondere alle esigenze specifiche delle operazioni di soccorso.
Clicca qui per saperne di più!
AMPLIF-AI
Lo scopo principale del progetto AMPLIF-AI (Adaptive Mission Planning for LIve inFrAstructures Inspection) è quello di monitorare le numerose infrastrutture del territorio altoatesino per garantirne l'operatività, l'efficienza e la sicurezza per la collettività. Il sistema, basato sull'intelligenza artificiale, consentirà alle squadre di ispezione di valutare le condizioni delle infrastrutture in tempo reale in diversi casi applicativi nel contesto alpino. I partner svilupperanno un sistema composto da una piattaforma di terra e da droni (UAV) supervisionati dalla squadra di ispezione.
Clicca qui per saperne di più!
LEAFLET2.0
Il progetto LEAFLET 2.0 ha come obiettivo lo sviluppo di una metodologia e di un servizio a supporto degli operatori professionisti nell’ambito della valutazione dello stato di salute e della stabilità strutturale del verde pubblico, attraverso l’integrazione di dati acquisiti mediante piattaforme UAS (Unmanned Aerial System) a basso costo, strumenti WebGIS e tramite l’impiego di tecniche basate su Intelligenza Artificiale (IA).
Il progetto è finanziato dalla Provincia Autonoma di Bolzano, mediante la misura Agevolazioni Innovazione - Progetti di ricerca industriale oppure di sviluppo sperimentale.
Clicca qui per saperne di più!
INDOOR

Il progetto INDOOR (usINg Drones fOr Organ tRansportation) è stato ideato e sviluppato grazie alla collaborazione con diversi partner, in particolare l'Università degli studi di Torino, il Politecnico di Torino, il Centro Regionale Trapianti, la Fondazione DOT Onlus, l'Azienda Ospedaliera Universitaria Città della Salute e delle Scienze di Torino e l'azienda PROS3.
L’obiettivo di questo progetto è attivare una serie di sperimentazioni per l’utilizzo di Sistemi Aeromobile a Pilotaggio Remoto nel settore della medicina dei trapianti, nell’ottica di prospettare scenari che abbinino maggiore efficacia e riduzione dei costi. Il progetto permetterà di studiare, sviluppare ed implementare la visione nel futuro del trasporto di materiale sanitario, con particolare attenzione alla medicina dei trapianti.
droneONtrap
Il progetto droneONtrap, in collaborazione con l'azienda Gruppo FOS, prevede la creazione di un sistema in grado di ridurre l'utilizzo di sostanze chimiche in campo agroalimentare, forestale ed ambientale attraverso l'utilizzo in sinergia di dati forniti da trappole per insetti e rilievi multispettrali tramite droni, questi ultimi sviluppati appositamente da MAVTech. Il sistema permetterà di valutare in tempo reale lo stato di salute delle piante, consentendo lo sviluppo di modelli predittivi ad alta precisione per aiutare i coltivatori a prendere decisioni determinanti negli stadi critici delle colture.
Il progetto è finanziato dal programma europeo "DIVA" che mira a supportare la nascita e lo sviluppo di nuove catene di valore digitech per i settori agroalimentare, forestale ed ambientale.
droneONtrap è stato l'unico progetto italiano ad essersi aggiudicato il finanziamento nella "2nd Call DIVA FUNDED PROJECTS – Demonstration". [CLOSED]
Clicca qui per saperne di più!
BLUESLEMON
Il progetto BLUESLEMON (BT Beacon and Unmanned Aerial System technologies for Landslide Monitoring) prevede la creazione di un sistema per il monitoraggio automatico di aree franose, basato su tecnologie Bluetooth (BT) Beacon, RFID e su un Sistema Aeromobile a Pilotaggio Remoto (SAPR) multiruolo/multi-obiettivo. Due sottosistemi principali determineranno la configurazione finale: la tecnologia dei sensori di terra e il sistema di localizzazione periodica composto dal SAPR e dal lettore di beacon. L’obiettivo del progetto è l’incremento della capacità di prevenzione dei danni da frana attraverso un monitoraggio ubiquo e pervasivo delle aree soggette a frane.
Clicca qui per saperne di più!
WEQUAL
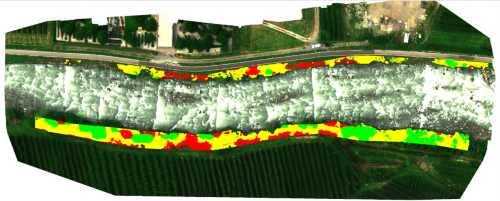
Il progetto WEQUAL (Centro servizi WEb per la progettazione multidimensionale di QUALità e monitoraggio teleoperato di Green Infrastructures) prevede la realizzazione di un sistema integrato di valutazione ambientale, basato su infrastrutture ICT e sistemi innovativi di rilevazione/monitoraggio di corsi d’acqua, per la progettazione di opere fluviali a basso impatto ambientale. Tale sistema intende essere di supporto alle decisioni dei progettisti in fase di progettazione/realizzazione dell’opera e dei tecnici delle amministrazioni pubbliche in fasi di monitoraggio e programmazione degli interventi. [CLOSED]
Clicca qui per saperne di più!
SASNET
Il progetto SasNet (SApr Swarm Network) intende sviluppare, prototipare e sperimentare un Sistema di APR (Aeromobili a Pilotaggio Remoto) utilizzati in sciame (Swarm) integrati in una rete mesh wi-fi, al fine di operare nel contesto alpino in caso di situazioni potenzialmente critiche – innalzamento della popolazione turistica lungo percorsi ciclabili, montani, laghi ecc..- di rischio o di emergenza. Si prevede l’integrazione di piazzole di ricarica e stazionamento sia mobili che fisse alimentate a energia solare. [CLOSED]
Clicca qui per saperne di più!
S-APR 2
Considerando i risultati finali del progetto SAPR, è emerso come le metodologie sperimentali e numeriche tuttora in uso in ambito automobilistico non siano idonee per valutare in maniera esauriente l’offensività dei SAPR (Sistemi Aeromobili a Pilotaggio Remoto).
Scopo del progetto S-APR 2 è definire quali caratteristiche debba avere un laboratorio, sia sperimentale che numerico, utilizzato per la valutazione dell’offensività dei SAPR, con massa massima al decollo inferiore a 25 kg. Il laboratorio potrà essere definito solo a seguito di un’approfondita analisi dell’evoluzione delle normative EASA (European Aviataion Safety Agency) e FAA (Federal Aviation Administration), tuttora vigenti o in fase di pubblicazione in materia di “safety” dei SAPR. Il progetto di ricerca si propone anche di definire quali debbano essere le caratteristiche di progettazione che un SAPR debba possedere per essere considerato inoffensivo e quali modifiche l’utilizzatore finale debba apportare per rendere il SAPR avente caratteristiche di offensività, già in sua dotazione, un velivolo inoffensivo. [CLOSED]
Clicca qui per saperne di più!
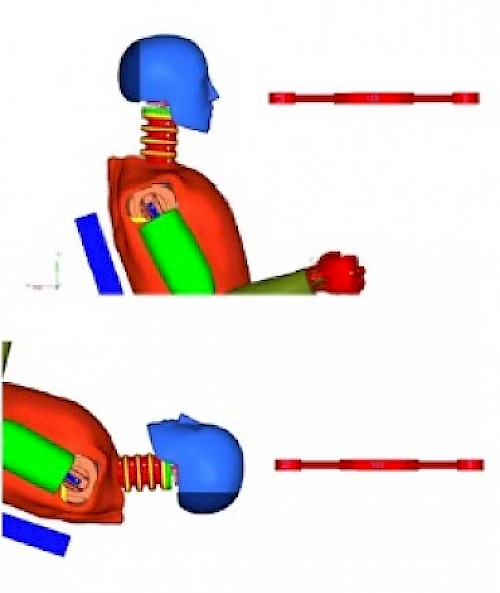
S-APR
Lo scopo principale del progetto di ricerca S-APR è determinare quali caratteristiche possono rendere “non letale” l’impatto di un SAPR per le persone. La mancanza di una linea guida per la certificazione dell’offensività (pericolosità) dei sistemi aeromobili a pilotaggio remoto, sia a livello italiano che europeo, rende praticamente impossibile certificare in modo deterministico tali mezzi per operazioni di volo in scenari misti o critici, e soprattutto in vicinanza di strutture sensibili (aeroporti, ferrovie, autostrade, assembramenti, manifestazioni, …). [CLOSED]
Clicca qui per saperne di più!
SMILE
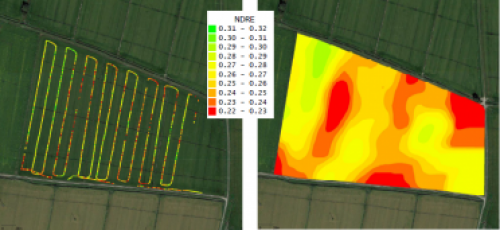
La finalità del progetto SMILE (SisteMa a pIlotaggio remoto per il supporto all'agricoLtura di precisionE) è lo sviluppo di un sistema di ricognizione automatico basato su Aeromobili a Pilotaggio Remoto (APR), quale supporto ai metodi dell’agricoltura di precisione, di interesse per agricoltori e ricercatori agronomi. Lo sviluppo di questo programma di ricerca prevede l’interazione progettuale di tre fattori fondamentali:
- il sistema di volo
- il sistema di misura
- gli utenti finali
Il sistema di volo include un segmento di volo e un segmento di terra per il controllo remoto del sistema. Il segmento di volo è un APR, noto più familiarmente come drone. [CLOSED]
Clicca qui per saperne di più!